PX4飞控代码阅读(2)位置速度控制器
Less than 1 minute
PX4飞控代码阅读(2)位置速度控制器
多旋翼控制器结构
整体控制器结构如下
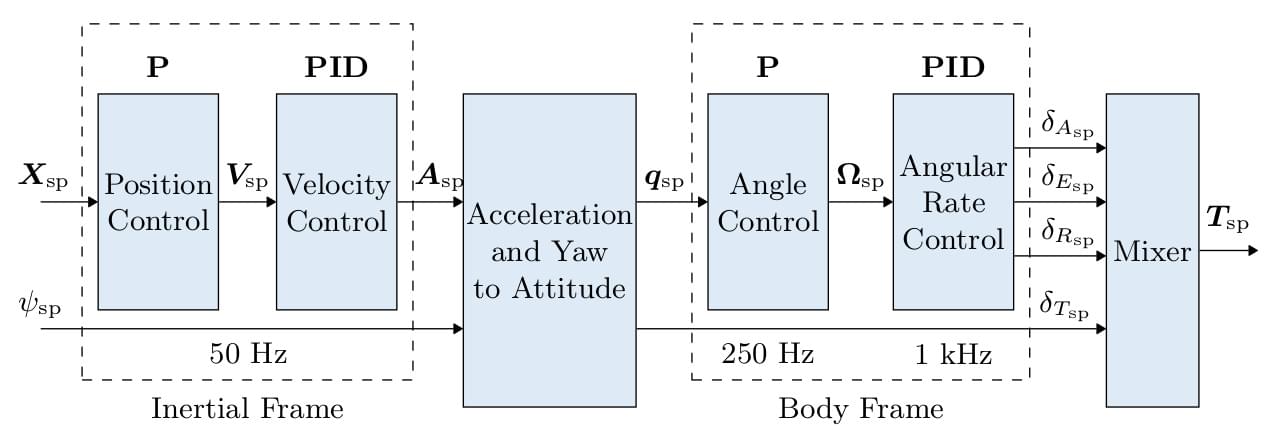
各模块分别位于:
- Position Control, Velocity Control, Acceleration&Yaw to Attitude:
src\modules\mc_pos_control - Angle Control:
src\modules\mc_att_control - Angular Rate Control:
src\modules\mc_rate_control - Mixer:
src\modules\control_allocator