1.16版本的PX4混控器改版了,Pipeline如下图:
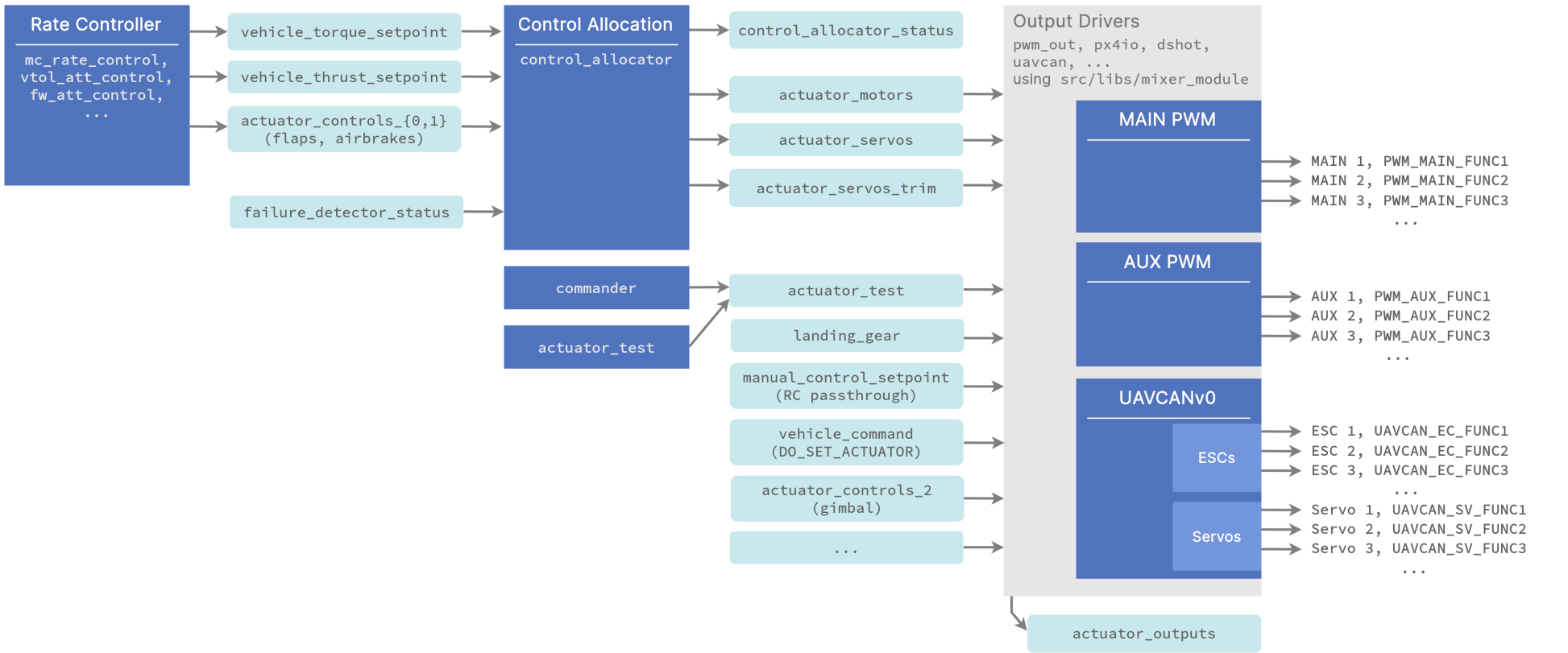 其中用于计算各执行器分配量的代码位于
其中用于计算各执行器分配量的代码位于src/lib/control_allocation/control_allocation。
控制分配器
控制分配器有两个版本,通过参数CA_METHOD控制。
伪逆法控制分配器
About 6 min
1.16版本的PX4混控器改版了,Pipeline如下图:
其中用于计算各执行器分配量的代码位于src/lib/control_allocation/control_allocation。
控制分配器有两个版本,通过参数CA_METHOD控制。
角度控制器主要代码位于src/modules/mc_att_control/AttitudeControl/AttitudeControl.cpp中,其核心为update函数。
角度控制采取了倾转分离的策略,倾斜(俯仰、偏航)的控制能力较强,而转向(偏航)的控制能力较弱,因此采用了不同的控制增益,将转向的控制量按比例缩小。
首先计算当前姿态和期望姿态分别对应的z轴方向(世界坐标系):
// calculate reduced desired attitude neglecting vehicle's yaw to prioritize roll and pitch
const Vector3f e_z = q.dcm_z();
const Vector3f e_z_d = qd.dcm_z();整体控制器结构如下
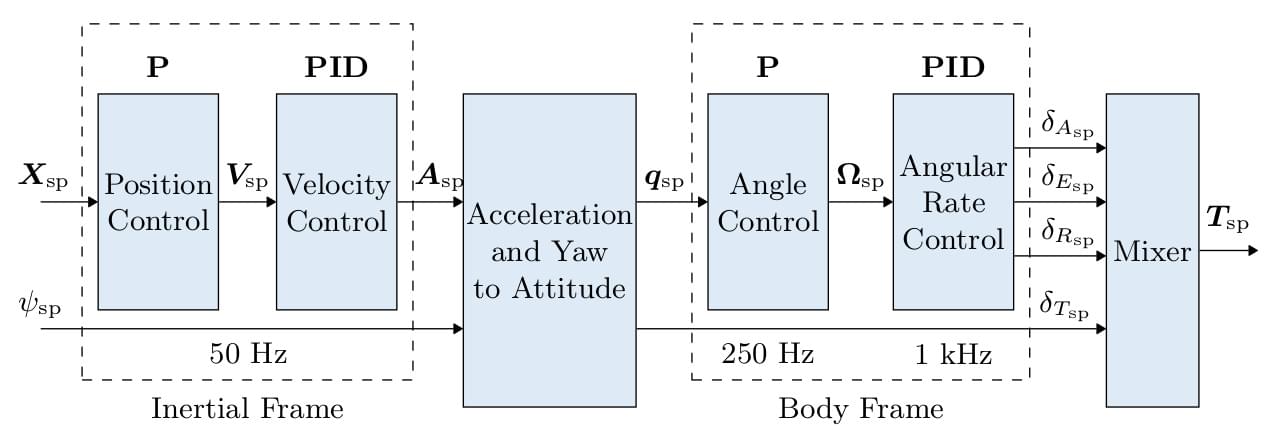
各模块分别位于:
src\modules\mc_pos_controlsrc\modules\mc_att_controlsrc\modules\mc_rate_controlsrc\modules\control_allocator