PX4飞控代码阅读(2)位置环
PX4飞控代码阅读(2)位置环
多旋翼控制器结构
整体控制器结构如下
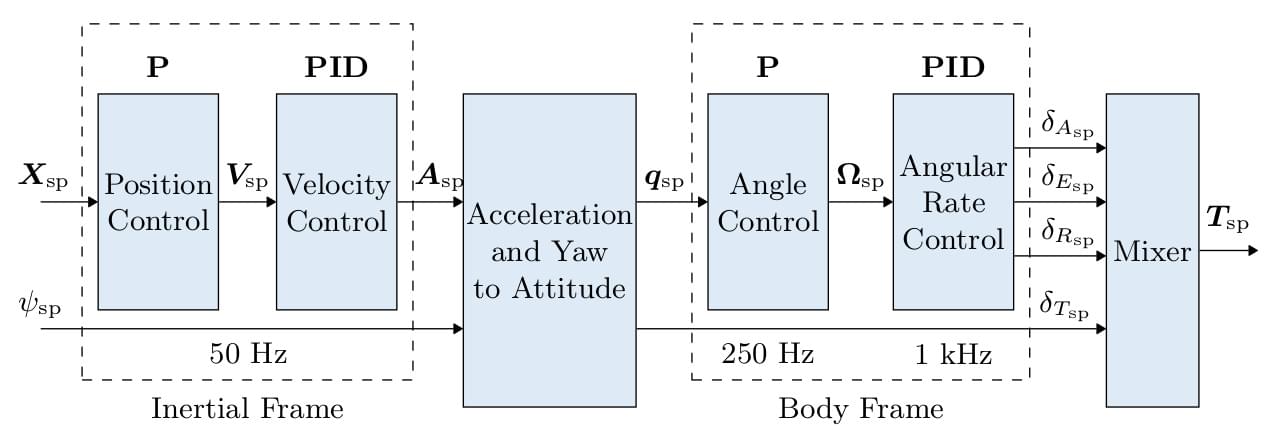
各模块分别位于:
- Position Control, Velocity Control, Acceleration&Yaw to Attitude:
src\modules\mc_pos_control - Angle Control:
src\modules\mc_att_control - Angular Rate Control:
src\modules\mc_rate_control - Mixer:
src\modules\control_allocator
速度控制量计算
位置控制的代码位于src\modules\mc_pos_control\PositionControl\PositionControl.cpp,核心函数为update:
bool PositionControl::update(const float dt)
{
bool valid = _inputValid();
if (valid) {
_positionControl();
_velocityControl(dt);
_yawspeed_sp = PX4_ISFINITE(_yawspeed_sp) ? _yawspeed_sp : 0.f;
_yaw_sp = PX4_ISFINITE(_yaw_sp) ? _yaw_sp : _yaw; // TODO: better way to disable yaw control
}
// There has to be a valid output acceleration and thrust setpoint otherwise something went wrong
return valid && _acc_sp.isAllFinite() && _thr_sp.isAllFinite();
}第6行根据位置设定点计算速度设定点:
void PositionControl::_positionControl()
{
// P-position controller
Vector3f vel_sp_position = (_pos_sp - _pos).emult(_gain_pos_p);
// Position and feed-forward velocity setpoints or position states being NAN results in them not having an influence
ControlMath::addIfNotNanVector3f(_vel_sp, vel_sp_position);
// make sure there are no NAN elements for further reference while constraining
ControlMath::setZeroIfNanVector3f(vel_sp_position);
// Constrain horizontal velocity by prioritizing the velocity component along the
// the desired position setpoint over the feed-forward term.
_vel_sp.xy() = ControlMath::constrainXY(vel_sp_position.xy(), (_vel_sp - vel_sp_position).xy(), _lim_vel_horizontal);
// Constrain velocity in z-direction.
_vel_sp(2) = math::constrain(_vel_sp(2), -_lim_vel_up, _lim_vel_down);
}首先通过一个P控制器计算速度控制量(第4行):
然后加上一个前馈项(来自期望轨迹上的期望速度,或是用户输入,或是简单设置为0)(第6行):
最后分别对水平XY方向的速度和垂直Z方向的速度进行限制。水平方向上优先保证
Note
水平方向的限制原理为:
如果
如果
如果两个向量相等,则使用
如果
否则,使用下面的代码,将
Vector2f u1 = v1.normalized();
float m = u1.dot(v0);
float c = v0.dot(v0) - max * max;
float s = -m + sqrtf(m * m - c);
return v0 + u1 * s;加速度控制量计算
加速度控制量计算的代码:
void PositionControl::_velocityControl(const float dt)
{
// Constrain vertical velocity integral
_vel_int(2) = math::constrain(_vel_int(2), -CONSTANTS_ONE_G, CONSTANTS_ONE_G);
// PID velocity control
Vector3f vel_error = _vel_sp - _vel;
Vector3f acc_sp_velocity = vel_error.emult(_gain_vel_p) + _vel_int - _vel_dot.emult(_gain_vel_d);
// No control input from setpoints or corresponding states which are NAN
ControlMath::addIfNotNanVector3f(_acc_sp, acc_sp_velocity);
_accelerationControl();
// ......
}核心的PID计算为:
这里的微分并不是误差项的微分,可以理解为期望速度为0时的误差项的微分,这是PX4为了使速度变化平缓进行的工程优化,后面角速度的控制也有类似设计。
接下来调用_accelerationControl()来计算期望姿态和油门设定,暂且按下不表,后面的代码进行抗饱和积分和推力分配。首先是对垂直方向的积分采用条件积分法进行抗饱和:
// Integrator anti-windup in vertical direction
if ((_thr_sp(2) >= -_lim_thr_min && vel_error(2) >= 0.f) ||
(_thr_sp(2) <= -_lim_thr_max && vel_error(2) <= 0.f)) {
vel_error(2) = 0.f;
}然后提取水平方向的推力,进行推力的预分配。预分配的原则是,优先满足垂直方向的控制,但保留一部分水平控制能力,因此首先预分配水平方向的推力:
const float allocated_horizontal_thrust = math::min(thrust_sp_xy_norm, _lim_thr_xy_margin);thrust_sp_xy_norm是水平推力的大小,将其限制在_lim_thr_xy_margin以内。接下来计算可供垂直方向使用的剩余推力:
const float thrust_z_max_squared = thrust_max_squared - math::sq(allocated_horizontal_thrust);这就是用最大推力的平方减去上一步分配给水平方向的推力平方。接下来使用这个值对垂直推力进行裁剪:
_thr_sp(2) = math::max(_thr_sp(2), -sqrtf(thrust_z_max_squared));然后再计算除掉垂直推力后真正剩余给水平推力的裕度:
const float thrust_max_xy_squared = thrust_max_squared - math::sq(_thr_sp(2));
float thrust_max_xy = 0.f;
if (thrust_max_xy_squared > 0.f) {
thrust_max_xy = sqrtf(thrust_max_xy_squared);
}再用这个裕度裁剪水平推力,得到真正分配给水平方向的推力大小:
if (thrust_sp_xy_norm > thrust_max_xy) {
_thr_sp.xy() = thrust_sp_xy / thrust_sp_xy_norm * thrust_max_xy;
}最后,对水平方向的加速度进行跟踪法抗饱和积分,其原理是将裁剪后的输出和期望输出作差,然后通过一个反馈增益反馈给积分环节,来调节积分器的饱和程度。
// Use tracking Anti-Windup for horizontal direction: during saturation, the integrator is used to unsaturate the output
// see Anti-Reset Windup for PID controllers, L.Rundqwist, 1990
const Vector2f acc_sp_xy_produced = Vector2f(_thr_sp) * (CONSTANTS_ONE_G / _hover_thrust);
// The produced acceleration can be greater or smaller than the desired acceleration due to the saturations and the actual vertical thrust (computed independently).
// The ARW loop needs to run if the signal is saturated only.
if (_acc_sp.xy().norm_squared() > acc_sp_xy_produced.norm_squared()) {
const float arw_gain = 2.f / _gain_vel_p(0);
const Vector2f acc_sp_xy = _acc_sp.xy();
vel_error.xy() = Vector2f(vel_error) - arw_gain * (acc_sp_xy - acc_sp_xy_produced);
}
// ......
// Update integral part of velocity control
_vel_int += vel_error.emult(_gain_vel_i) * dt;代码首先计算水平推力能产生的加速度,用arw_gain乘饱和量,再以这个值进行积分。
期望姿态和推力计算
如图所示,升力、重力和无人机的加速度方向有着这样的关系,而升力始终垂直于无人机平面,因此可以通过它来算出期望的姿态。采用NED(北、东、下方向为正)坐标系,则机身方向向量:
对应的代码:
void PositionControl::_accelerationControl()
{
// Assume standard acceleration due to gravity in vertical direction for attitude generation
float z_specific_force = -CONSTANTS_ONE_G;
if (!_decouple_horizontal_and_vertical_acceleration) {
// Include vertical acceleration setpoint for better horizontal acceleration tracking
z_specific_force += _acc_sp(2);
}
Vector3f body_z = Vector3f(-_acc_sp(0), -_acc_sp(1), -z_specific_force).normalized();
// ...这里通过_decouple_horizontal_and_vertical_acceleration来设置是否耦合纵向加速度。
然后限制倾斜在安全范围内:
ControlMath::limitTilt(body_z, Vector3f(0, 0, 1), _lim_tilt);计算出的机身方向向量在PositionControl::getAttitudeSetpoint函数中被转换成四元数,作为机身姿态控制环的输入。
接下来计算油门,垂直方向的油门大小为(向下为正)
这里_hover_thrust即悬停油门,相当于
然后计算垂直机体方向的总油门大小:
这里的分母是机身方向单位向量在z轴方向的分量。代码中实际上还进行了一次裁剪以确保不超过油门限值。最后,乘以机身单位向量来得到矢量的油门:
对应的代码如下:
// Convert to thrust assuming hover thrust produces standard gravity
const float thrust_ned_z = _acc_sp(2) * (_hover_thrust / CONSTANTS_ONE_G) - _hover_thrust;
// Project thrust to planned body attitude
const float cos_ned_body = (Vector3f(0, 0, 1).dot(body_z));
const float collective_thrust = math::min(thrust_ned_z / cos_ned_body, -_lim_thr_min);
_thr_sp = body_z * collective_thrust;